Self-calibrating Polarising Radiometric Calibration
Daniel Teo Guangwei1 Boxin Shi2 Yinqiang Zheng3 Sai-Kit Yeung1
1Information Systems Technology and Design, Singapore University of Technology and Design, Singapore
2National Engineering Laboratory for Video Technology, School of EECS, Peking University, China
3Digital Content and Media Sciences Research Division, National Institute of Informatics, Japan
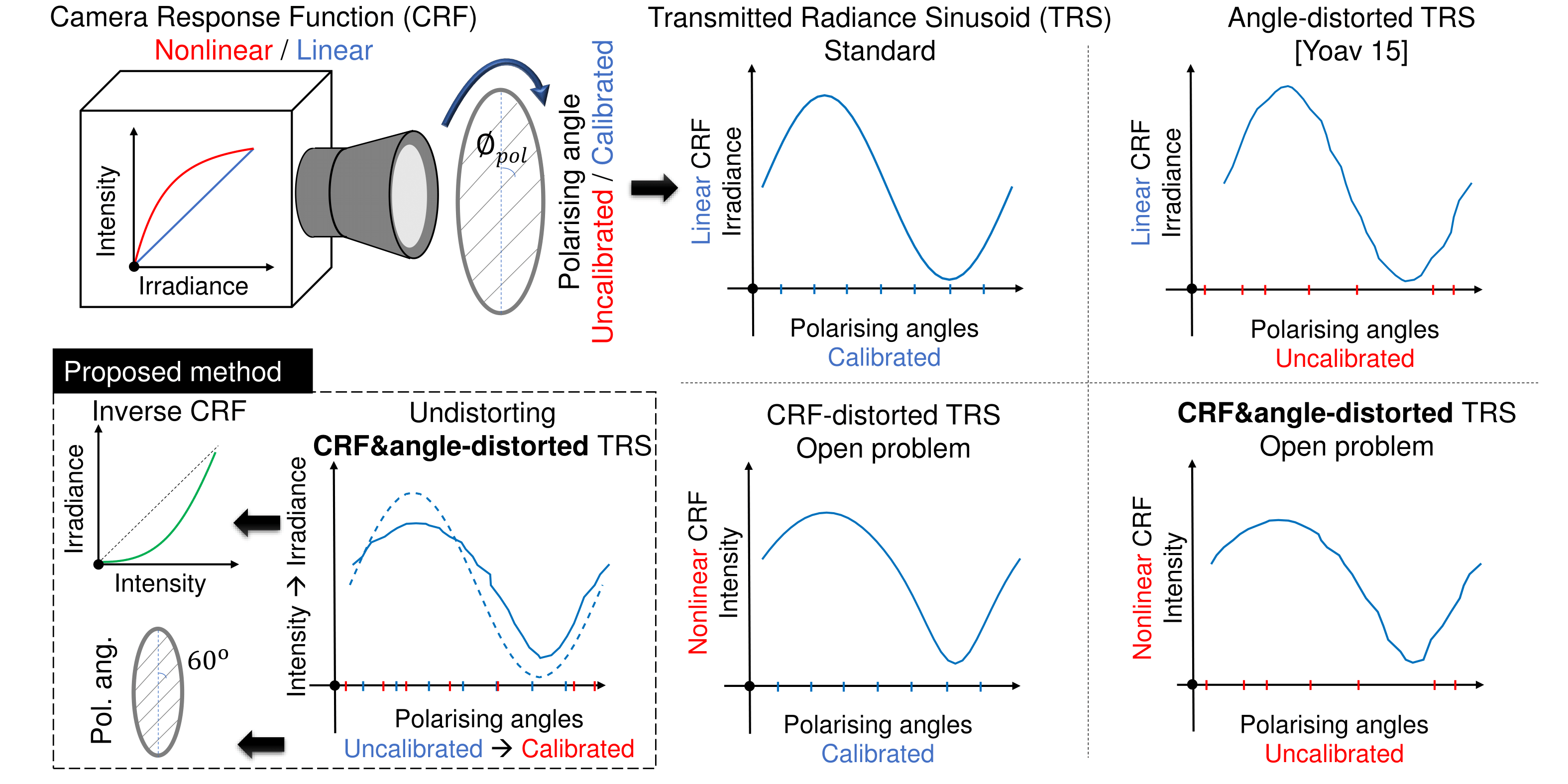
Description of the problem of radiometric calibration and unknown polarising angles
Abstract
We present a self-calibrating polarising radiometric calibration method. From a set of images taken from a single viewpoint under different unknown polarising angles, we recover the inverse camera response function and the polarising angles relative to the first angle. The problem is solved in an integrated manner, recovering both of the unknowns simultaneously. The method exploits the fact that the intensity of polarised light should vary sinusoidally as the polarising filter is rotated, provided that the response is linear. It offers the first solution to demonstrate the possibility of radiometric calibration through polarisation. We evaluate the accuracy of our proposed method using synthetic data and real world objects captured using different cameras. The self-calibrated results were found to be comparable with those from multiple exposure sequence
Publication
Self-calibrating polarising radiometric calibration
Daniel Teo Guangwei, Boxin Shi, Yinqiang Zheng, Sai-Kit Yeung
In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, 2018
@inproceedings{sprc-cvpr18,
author = {Daniel Teo Guangwei, Boxin Shi, Yinqiang Zheng, Sai-Kit Yeung},
title = {Self-calibrating polarising radiometric calibration},
booktitle = {IEEE Conference on Computer Vision and Pattern Recognition},
year = {2018}
}
Acknowledgements
Daniel Teo and Sai-Kit Yeung are supported by the SUTD Digital Manufacturing and Design Centre which is supported by the Singapore National Research Foundation (NRF). Boxin Shi is supported by the Recruitment Pro- gram of Global Experts (Youth Program) in China (a.k.a. 1000 Youth Talents). Yinqiang Zheng is supported in part by JSPS KAKENHI Grant Number JP15H05918 and Mi- crosoft Research Asia through the 2017 Collaborative Re- search (Core13). Sai-Kit Yeung is also supported by Sin- gapore MOE Academic Research Fund MOE2016-T2-2- 154, Heritage Research Grant of the National Heritage Board, Singapore, and Singapore NRF under its IDM Fu- tures Funding Initiative and Virtual Singapore Award No. NRF2015VSGAA3DCM001-014.
Experimental Setup

Camera and rotating mount with polarising filter

Points selected on the 2 objects captured
Results

Results from synthetic data
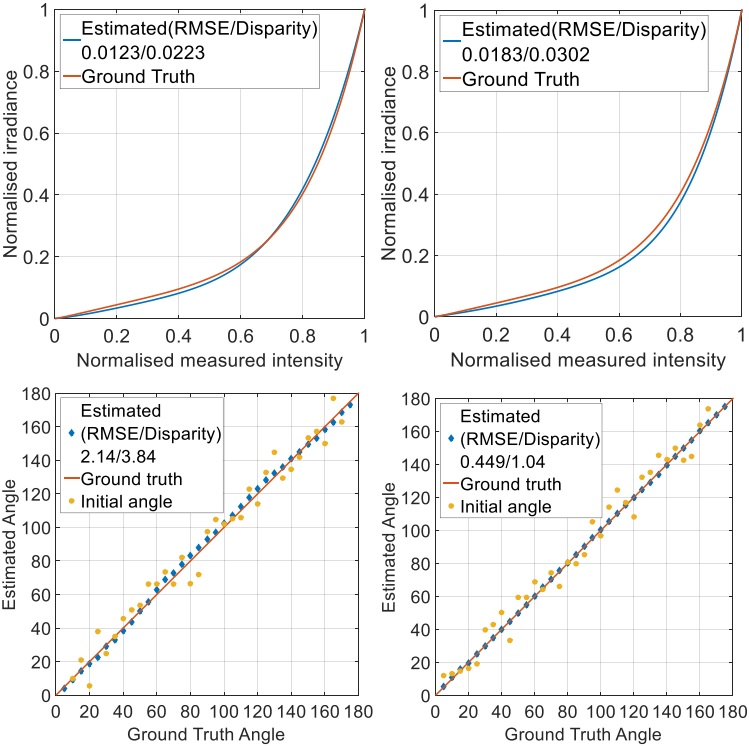
Results for Tiger (left) and Lion (right) objects taken from Nikon D800E
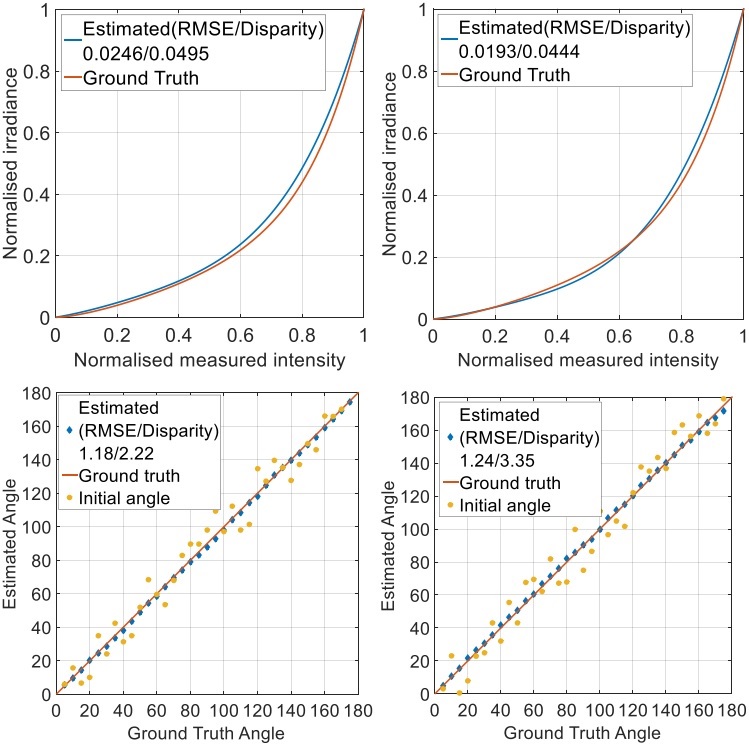
Results for Tiger (left) and Lion (right) objects taken from Canon EOS M2
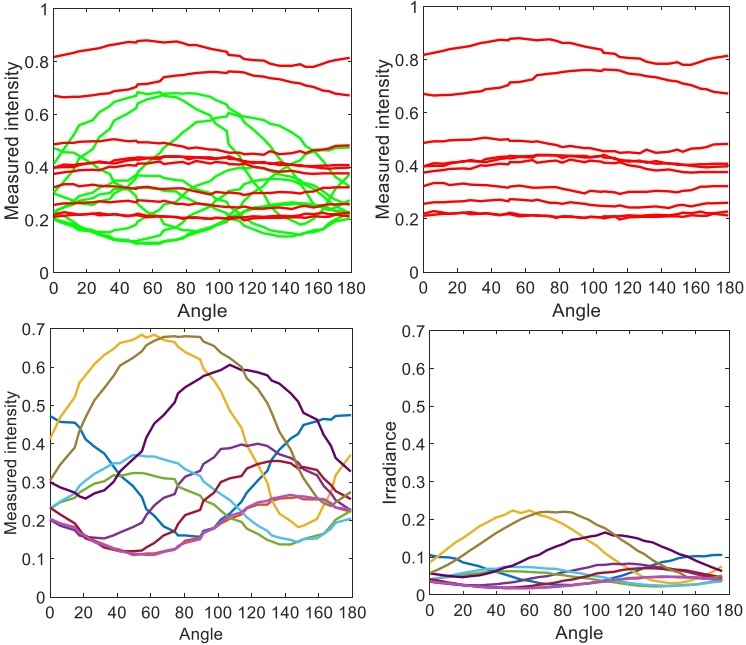
Showing the undistortion process